Assessment Robotics:
Haptic Training Tools for Objective Assessment.
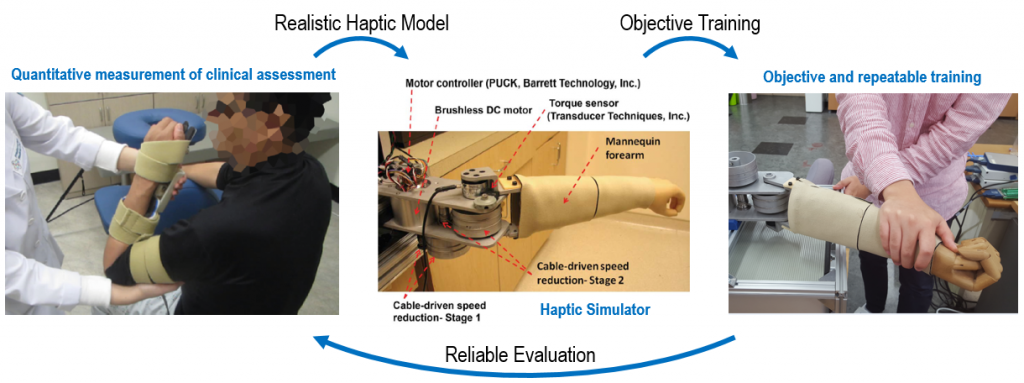
In rehabilitation medicine, most assessments still depend on subjective perception of clinicians. The subjectivity degrades reliability of the assessment scales. For reliable assessment, we developed robotic devices which provide haptic simulation of patients for repeatable and objective training of assessment. We also developed haptic models of spasticity, one of the most prevalent impairments, and implemented the models to the simulator. Novice clinicians can be familiarized with the clinical assessment scales through practices using the simulator.
AI for Clinical Assessments.
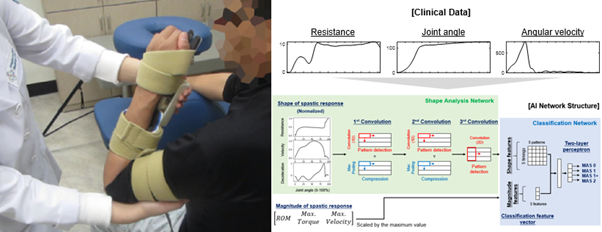
In a clinic, various assessment methods are used to evaluate patient conditions and determine treatment plans. However, these clinical assessment tools suffer from inconsistency due to their simplified protocols designed for quick and convenient use. Artificial intelligence (AI) solutions that mimic clinical assessments are expected to improve reliability of the assessments by making consistent decisions across repetitions. We have developed AI for assessing the severity of spasticity, a common motor impairment following a stroke. Our research aims not only to achieve high agreement with human clinicians, but also to obtain a better understanding of clinical assessments by interpreting the developed AI.
Assistive Robotics:
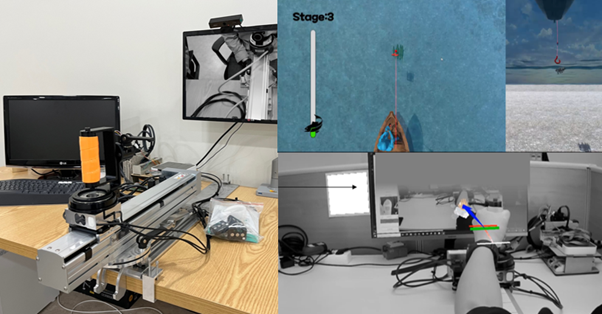
Shared Autonomy in High DOF Hand Robot
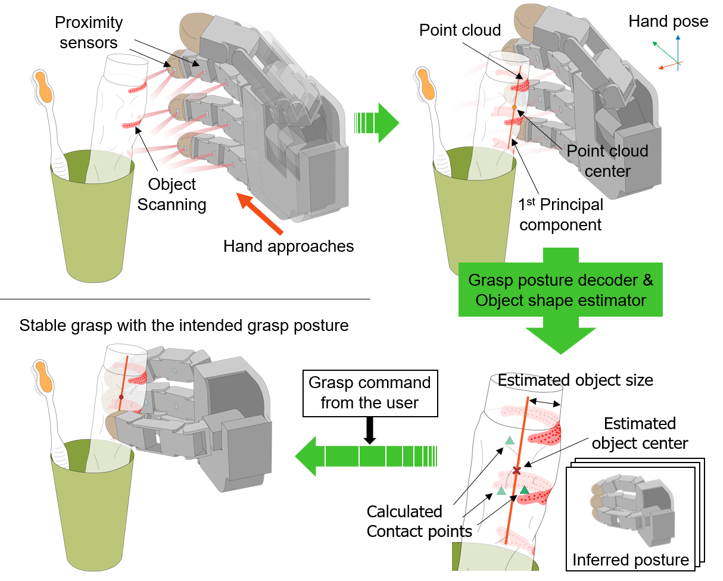
High Degree-of-Freedom (DOF) robotic systems, such as robotic hands, offer unparalleled potential for complex manipulation tasks, yet their control remains challenging due to the sheer number of variables and intricate mechanical dynamics. Shared autonomy bridges the gap between full manual control and full automation by integrating human intent with intelligent robotic systems, enhancing usability and performance. Our research focuses on developing intuitive control frameworks and algorithms that combine machine learning, real-time data processing, and advanced sensory feedback to enable seamless control and facilitate seamless human-robot collaboration. By leveraging adaptive control strategies, we aim to empower users with natural and precise manipulation capabilities for applications in prosthetics, robotic hands, and assistive robotics.
Soft Hand Exotendon Device providing dexterous motions
Hand is the most affected body part in the upper limb caused by neurological disorders, and the recovery is known to require most time. We are developing a soft hand exotendon device that replicates the structure and function of the hand tendons and muscles to provide dexterous motions with a compact and light design. Repetitive training of various grasping task will be available by using this device, which is expected to improve the recovery of hand functions for activities of daily living.

Biomimetic Skin Structure for Prosthetic Hand
Development of skin structure for prosthetic hands by mimicking the structure of human skin. By applying the porous silicone structure as the subcutaneous fat layer, developed skin structure has similar stiffness characteristics of human skin. thus it has similar functionality (stability) of human skin. Research is underway to reproduce skin wrinkles and deformations due to the hand motions.

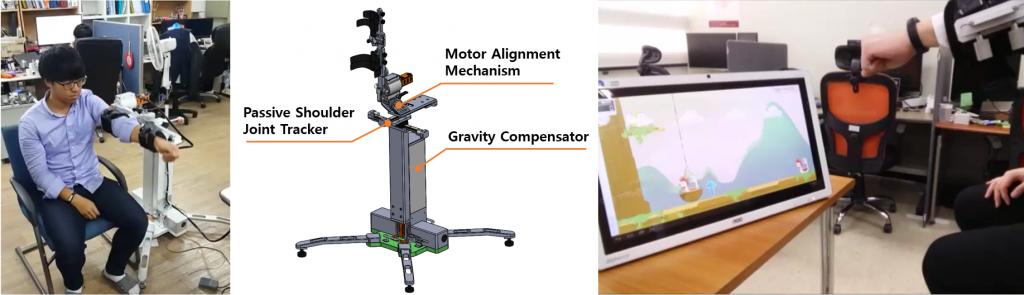
Joint Tracking Module for Upper Limb
Shoulder disorders became more prevalent in recent years due to the increase in injuries in sports as well as neurological disorders. The patients suffering from the shoulder injuries don’t use the damaged side, so they deteriorate over time. Also, the shoulder joint is the most complex joint in the human body. If the movement of the shoulder joint is not considered, they feel uncomfortable force from the device. The shoulder rehabilitation robot is a low-end shoulder rehabilitation system using only one actuator and passive shoulder joint tracker. It provides various rehabilitation motion and treatment modes for the patients. The system also includes interesting games.
Foot and Ankle Rehabilitation Robot
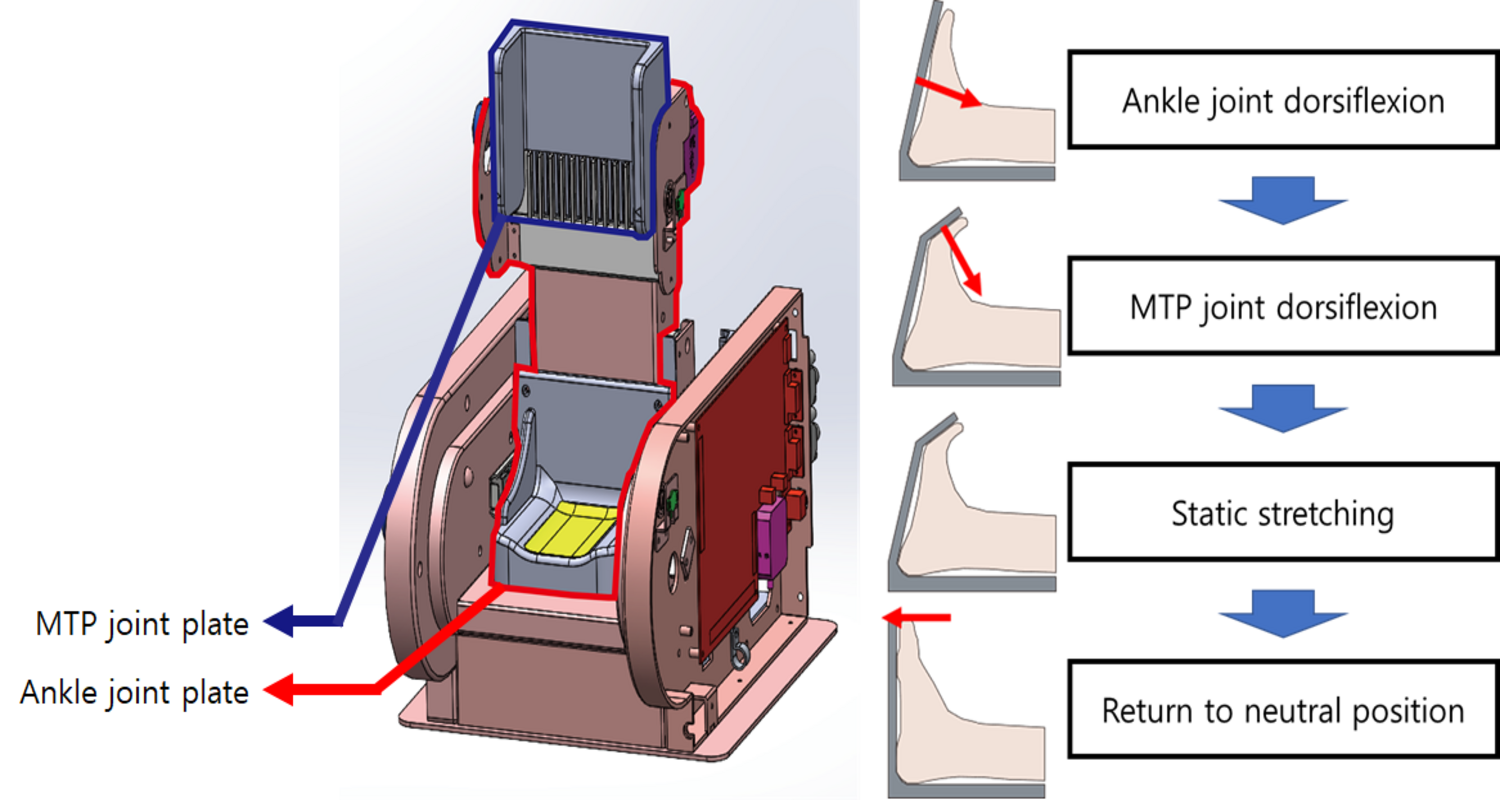
Plantar fasciitis and similar conditions often lead to stiffness and pain in the plantar fascia, requiring therapeutic interventions to improve joint mobility. While devices exist to stretch either the ankle (talocrural) joint or the metatarsophalangeal (MTP) joints, there are limited solutions that address these two critical areas simultaneously. Our research group has developed a novel rehabilitation device capable of providing simultaneous, controlled stretching of both the ankle and MTP joints. By integrating real-time monitoring of joint angles and torque, the device enables precise assessment of plantar fascia stiffness and provides quantitative indicators for the severity of plantar fasciitis. We are also actively exploring the development of personalized stretching protocols tailored to the specific needs of individuals with plantar fasciitis. Moreover, our interests extend to adapting this technology to treat other conditions, such as Achilles tendinitis and range of motion (ROM) limitations following ankle surgery, with the ultimate goal of creating versatile therapeutic solutions for diverse patient populations.
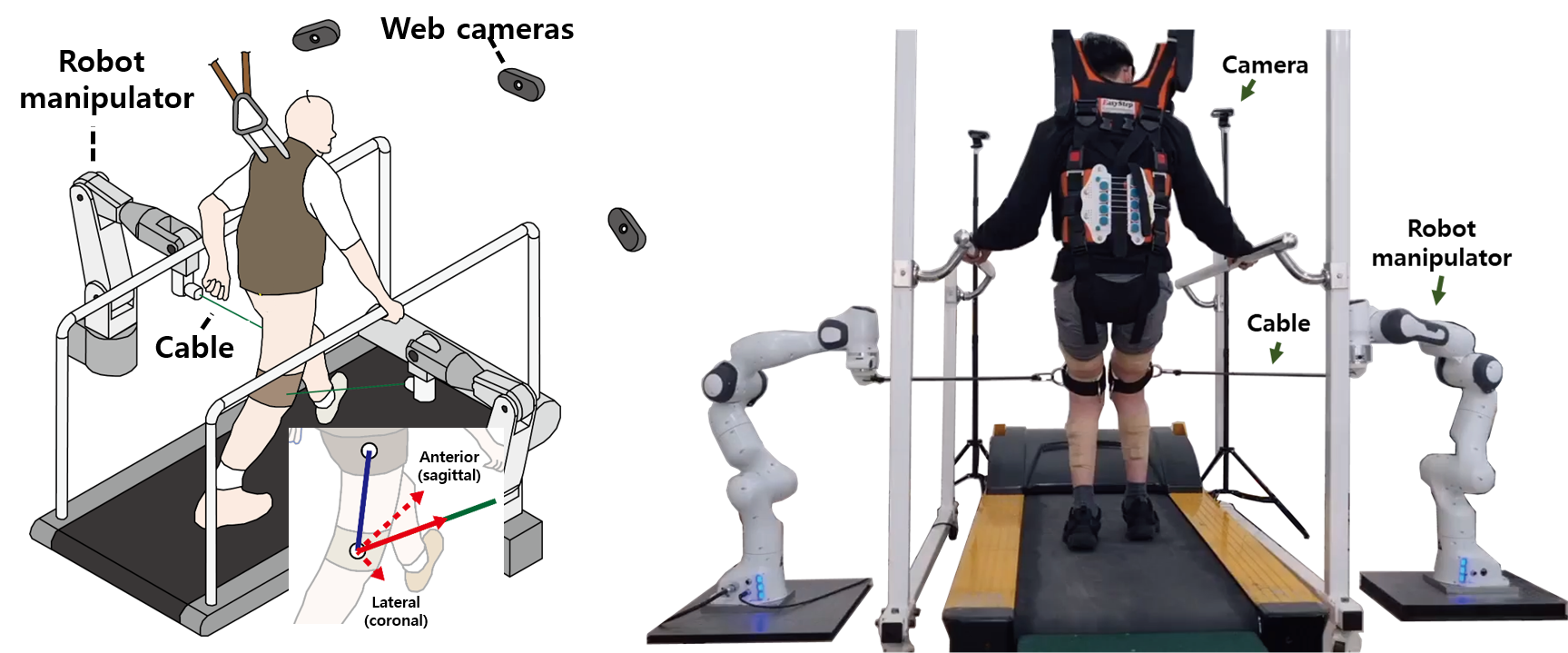
Use of Robot manipulator for Gait Rehabilitation
Human gait is a crucial aspect of quality of life, but impaired gait abilities, such as those caused by neurological disorders like cerebral palsy, tend to deteriorate without appropriate intervention. We are developing a gait rehabilitation device for improving crouch gait, a typical abnormal gait pattern observed in children with cerebral palsy. This device employs cables connected to a robotic manipulator, aiming to maximize motor learning by minimizing additional mass and inertia on the patient’s lower limbs and allowing for voluntary movement. The manipulator is controlled based on the patient’s gait motion, analyzed using a motion analysis algorithm, to provide suitable 3-DOF assistance and resistance through the cables. We expect that this system will not only improve the gait abilities of patients but also enable them to effectively learn unimpaired gait patterns.
Muscle Synergy:
Muscle Synergy for Neurorehabilitation
Human body performs exercises by simultaneously actuating a number of muscles, making coordination among them essential. Groups of muscles activated together are called ‘muscle synergies.’ Neurological diseases, such as stroke, affect the structure and activation timing of these muscle synergies, leading to movement impairments. Our research investigated muscle synergies underlying upper limb exercises in both stroke-affected and intact limbs. We have developed rehabilitation training specifically targeting the stroke-specific patterns of upper limb muscle synergies. Currently, we are working on rehabilitation training hardware and method, as well as training interfaces to improve quality of the training.
Muscle Synergy for Sports
Understanding the neuromuscular strategies that drive athletic performance is essential for advancing training methods and injury prevention in sports. Our research applies the principles of muscle synergies—coordinated activations of muscle groups—to analyze and optimize performance in sports tasks. Using extensive data collection methods, including electromyography (EMG), motion capture, force plates, and indirect calorimetry, we model muscle activity and identify motor control strategies. These insights provide a foundation for developing targeted training interventions, enabling athletes to refine their movements and achieve high-level performance across diverse sports.

Sensory Feedback
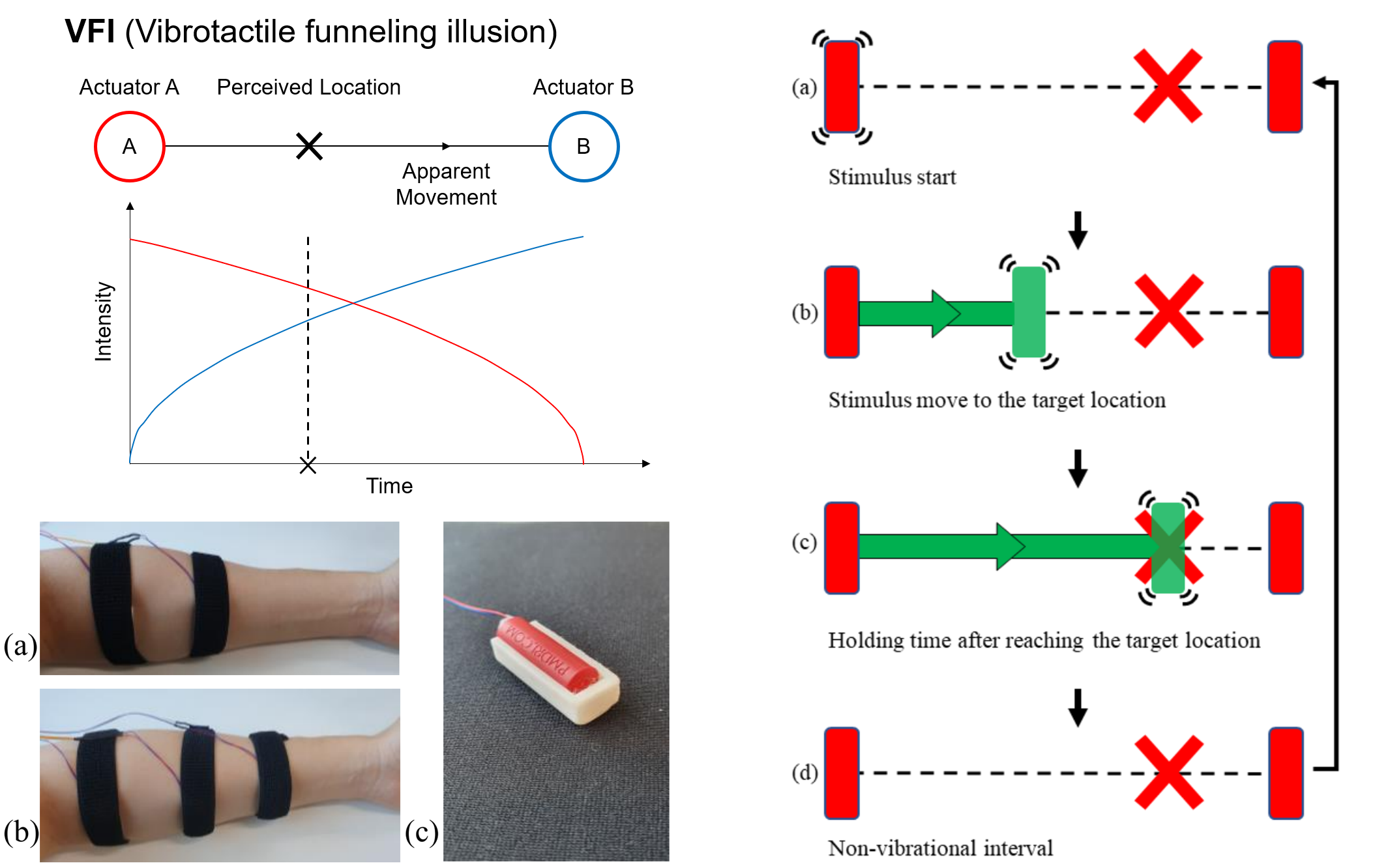
Tactile Feedback for Neurorehabilitation
Sensory impairment is a common symptom in patients with brain disorders such as stroke, where damage to tactile, balance, and proprioceptive senses disrupts the sensory feedback loop, hindering motor function and slowing neurorehabilitation. Our research aims to enhance neurorehabilitation outcomes and improve patients’ ability to perform daily activities through tactile feedback methods such as vibrotactile, electrotactile, and pressure stimulation. Our primary interest focuses on controlling stimulation parameters to generate diverse patterns, enabling the delivery of multi-degree-of-freedom information through tactile feedback.